| > Current Research > Pose Estimation |
 |
Pose Estimation |
Goal
In order to build a correct 3D model from scans and camera images, it is necessary to determine from where these scans and images were taken. Hence, we have developed techniques to determine the pose of our acquisition truck and its sensors, and to register the acquired laser scans with a global coordinate system.
Our approach utilizes techniques originally developed for navigation of mobile robots and consists of the following steps:
Scan matching between subsequent horizontal scans for obtaining an initial path
Global pose correction with Monte-Carlo-Localization on a Digital Surface Model
In the past, we have also investigated alternative methods for global pose correction:
3. Roll correction based on images
Results
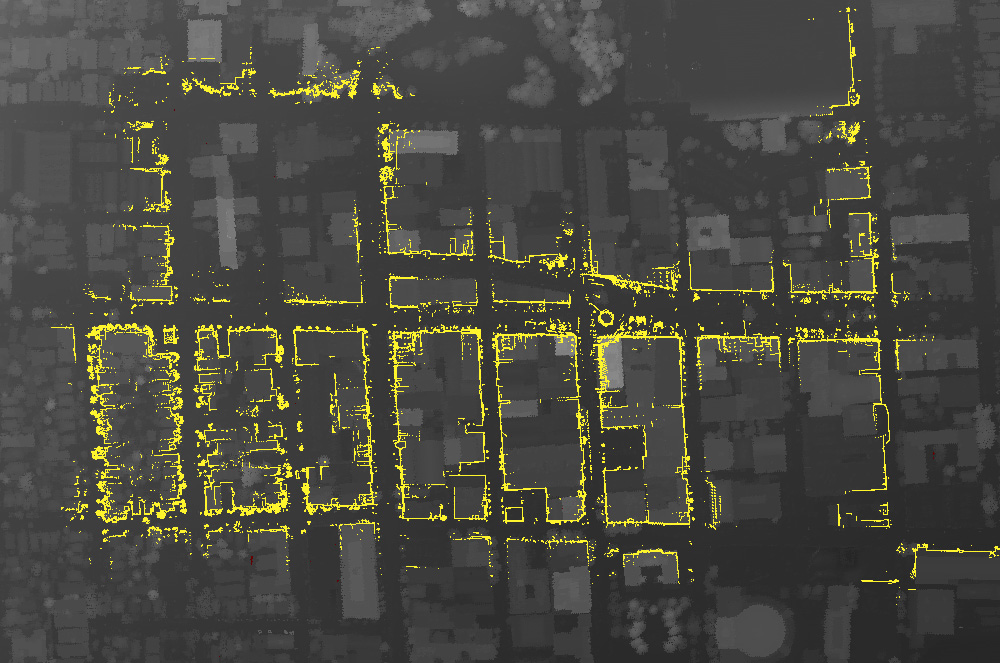
Driven path (left image, red) and ground-based scan points (right image, yellow) are registered with global data such as a DSM.

(Click on pictures to enlarge)