CLASSIFYING URBAN LANDSCAPE IN AERIAL LIDAR
Matt Carlberg, Peiran Gao, George Chen and Avideh Zakhor
The classification of
urban landscape in aerial LiDAR point clouds can
potentially improve the quality of largescale 3D
urban models, as well as increase the breadth of objects that can be detected
and recognized in urban environments. In this paper, we introduce a
multi-category classification system for aerial LiDAR
point clouds. We propose the use of a cascade of binary classifiers for
labeling each LiDAR return of an input point cloud as
one of five categories: water, ground, roof, tree, and other. Each binary
classifier identifies LiDAR returns corresponding to
a particular class, and removes them from the processing pipeline. Categories
of LiDAR returns that exhibit the most discriminating
features, such as water and ground, are identified first. More complex
categories, such as trees, are identified later in the pipeline after
contextual information, such as the location of ground and roofs, has been obtained,
and a significant number of LiDAR returns have already
been removed from the pipeline. We demonstrate results on a North American
dataset, consisting of 125 million LiDAR returns over
3 km2, and a European
dataset, consisting of 200 million LiDAR returns over
7 km2. We show that our
ground, roof, and tree classifiers, when trained on one dataset, perform
accurately on the other dataset.
More details on this project can be found in this paper.
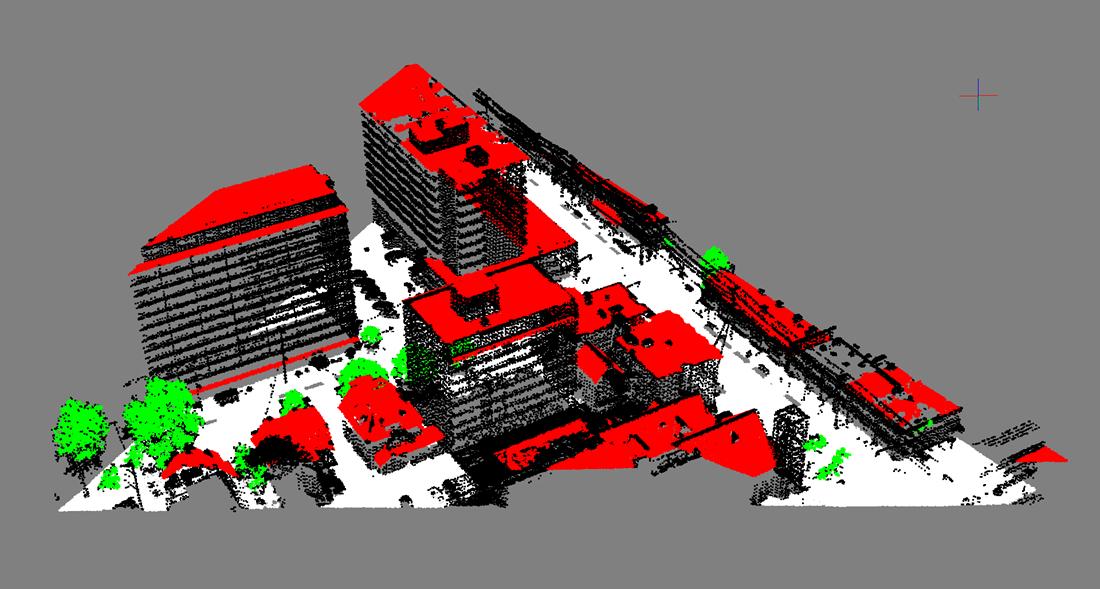
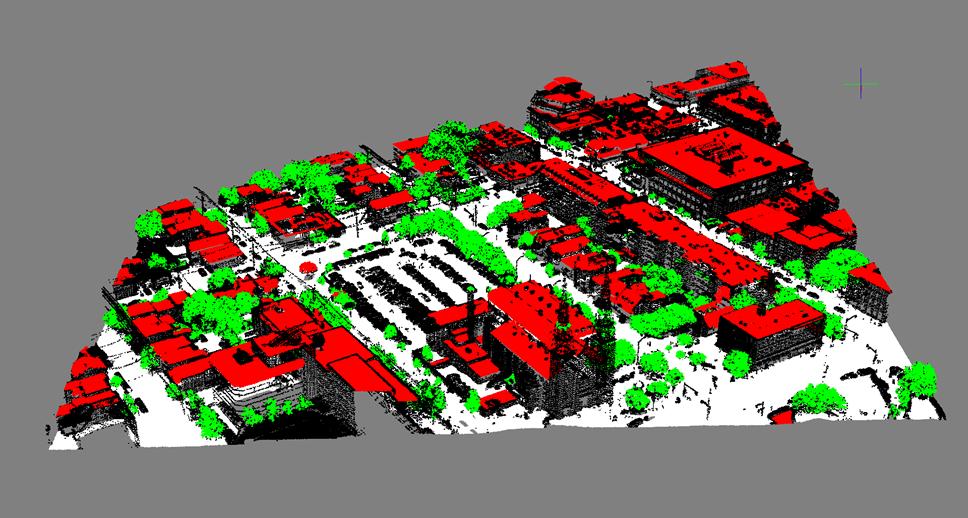
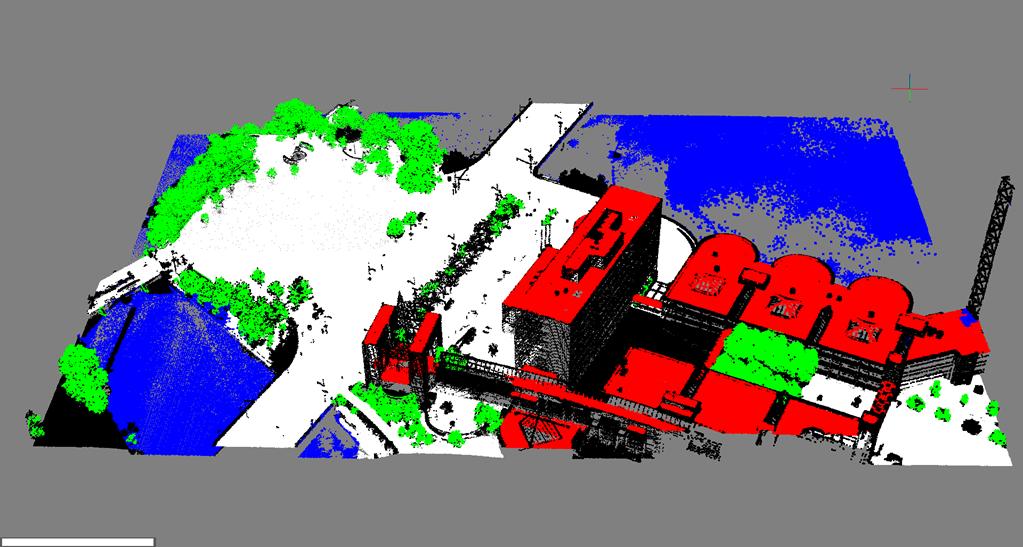
Results of our entire LiDAR classification system using the 3D classifier on (a) D1 dataset for a
North American City and (b) D2 data set for a
colored blue, ground points
are white, roof points are red, tree points are green, and other points are
black.
Below are several more examples of the classification results for the North American city. The complete set of classification results can be downloaded from here.