| Pose Correction with Monte-Carlo Localization |
Monte Carlo Localization (MCL)
In order to make our tracking very robust and independent of digital roadmaps, we formulated our estimation as a probabilistic problem and used Markov Localization, implemented as Monte Carlo Localization (MCL) [Thrun et. al.]:
MCL using Aerial Images [and Digital Roadmaps] [Frueh and Zakhor, CVPR 2001]
This movie shows the result for a part of our downtown Berkeley path; the yellow spots that travel through the aerial image are areas with a non-zero probability that our truck was there during the data acquisition:
Click on image to view movie (2.5 MB)
A final position estimate can be computed by observing the probability distribution. Here is the result of the MCL corrected path. The scan points of the horizontal laser scans (yellow) are superimposed on top of the aerial edge map.
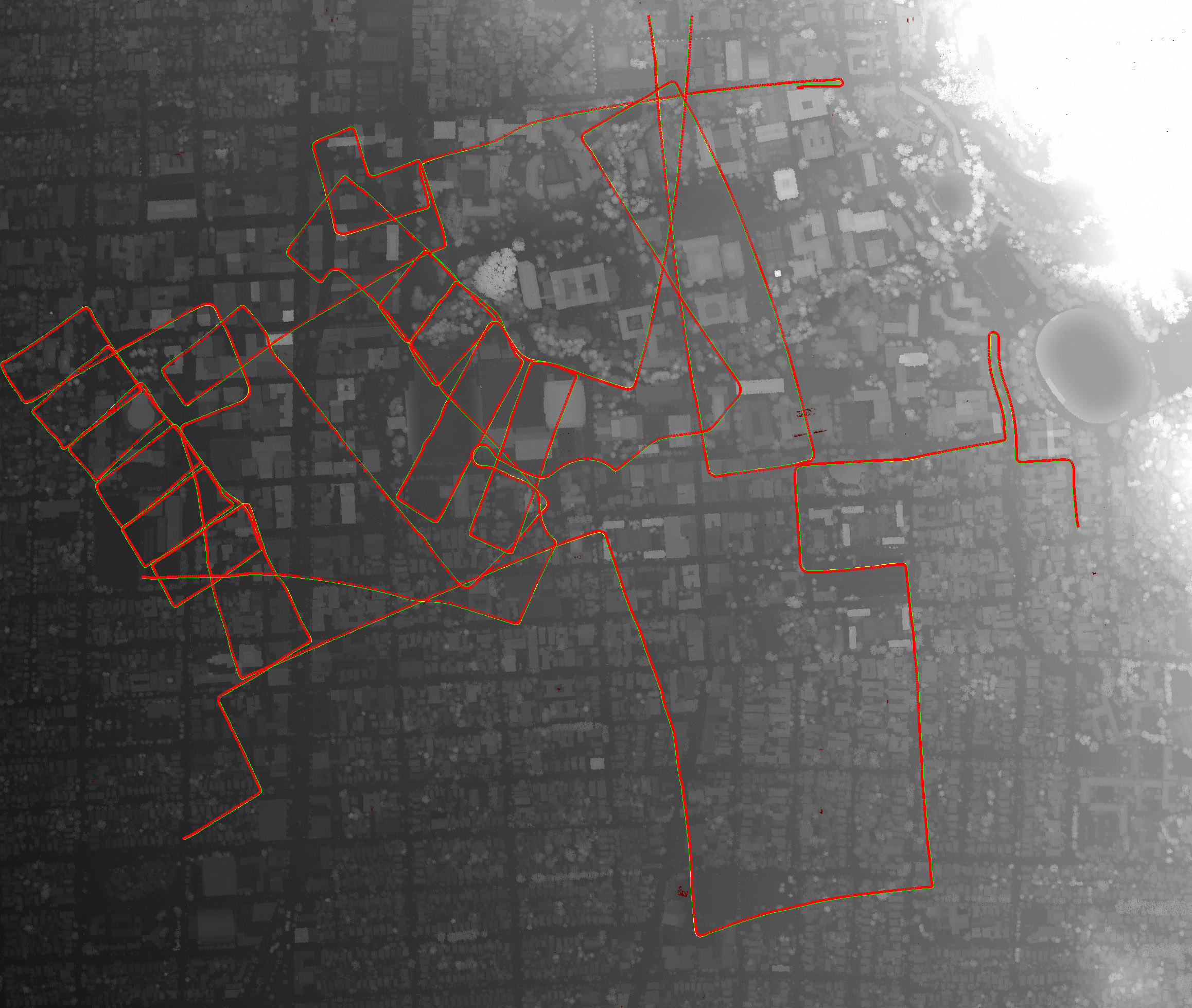
MCL using a Digital Surface Model (DSM) [Frueh and Zakhor, CVPR 2003]
The driven path (red) is registered with the edges of a DSM:
(Click on pictures to enlarge)
(a) before MCL correction (b) after MCL correction
As a result, the ground-based horizontal scan points match the edges of the DSM:
Here's a MOVIE (35Mb) about the MCL correction with a DSM. Shown is the blob of particles moving in the DSM, the edge map created from the DSM, and how the horizontal scan points are matched to the edge map.