Automated, 3D Modeling of Building Interiors
Three-dimensional models of
objects, sites, buildings, structures, and urban environments made of geometry
and texture are important in a variety of civilian and military applications
such as training and simulation for disaster management, counteracting
terrorism, virtual heritage conservation, virtual museums, historical sites
documentation, mapping of hazardous sites and underground tunnels, and modeling
of industrial and power plants for design verification and manipulation.
While object modeling has
received a great deal of attention in recent years, 3D site modeling,
particularly for indoor environments, poses significant challenges. The main
objective of this proposal is to design, analyze, and develop architecture and
algorithms, as well as associated statistical and mathematical framework for a
human operated, portable, 3D indoor/outdoor modeling system, capable of
generating photo-realistic rendering of the internal structure of multi-story
buildings as well as external structure of a collection of buildings in a
campus.
Key technical challenges
consist of system architecture, sensor choice, calibration, and error
characterization, local and global localization algorithms, sensor integration,
registration, and fusion, and complete and accurate coverage of all
details. Using a human-operated backpack system equipped with 2D
laser scanners, cameras, and inertial measurement units, we develop four
scan-matching-based algorithms to localize the backpack and compare their
performance and tradeoffs. In addition, we show how the scan-matching-based
localization algorithms combined with an extra stage of image-based alignment
can be used for generating textured, photorealistic 3D models. We present
results for two datasets of a 30-meter-long indoor hallway.
Full
3D Models Available for Download
Download
3D models for both datasets 1 and 2 here. Note zip file size
is approx 280MB.
The
zip file includes two 3D models, one for dataset 1 and one for dataset 2. Both
datasets were acquired on July 1, 2009, on the fourth floor of Cory Hall at UC
Berkeley. The two datasets were acquired by two different human operators with
two different walking gaits. Each model is a textured, triangular mesh saved as
a .ive file, which is a native format of the software osgviewer. To view these
models first download OpenSceneGraph. Once you have
downloaded OpenSceneGraph, in Windows you should open a command prompt, cd to
the directory in which the .ive files are stored, and enter a command of the
form "osgviewer cory4_20090701_setX_blended.ive".
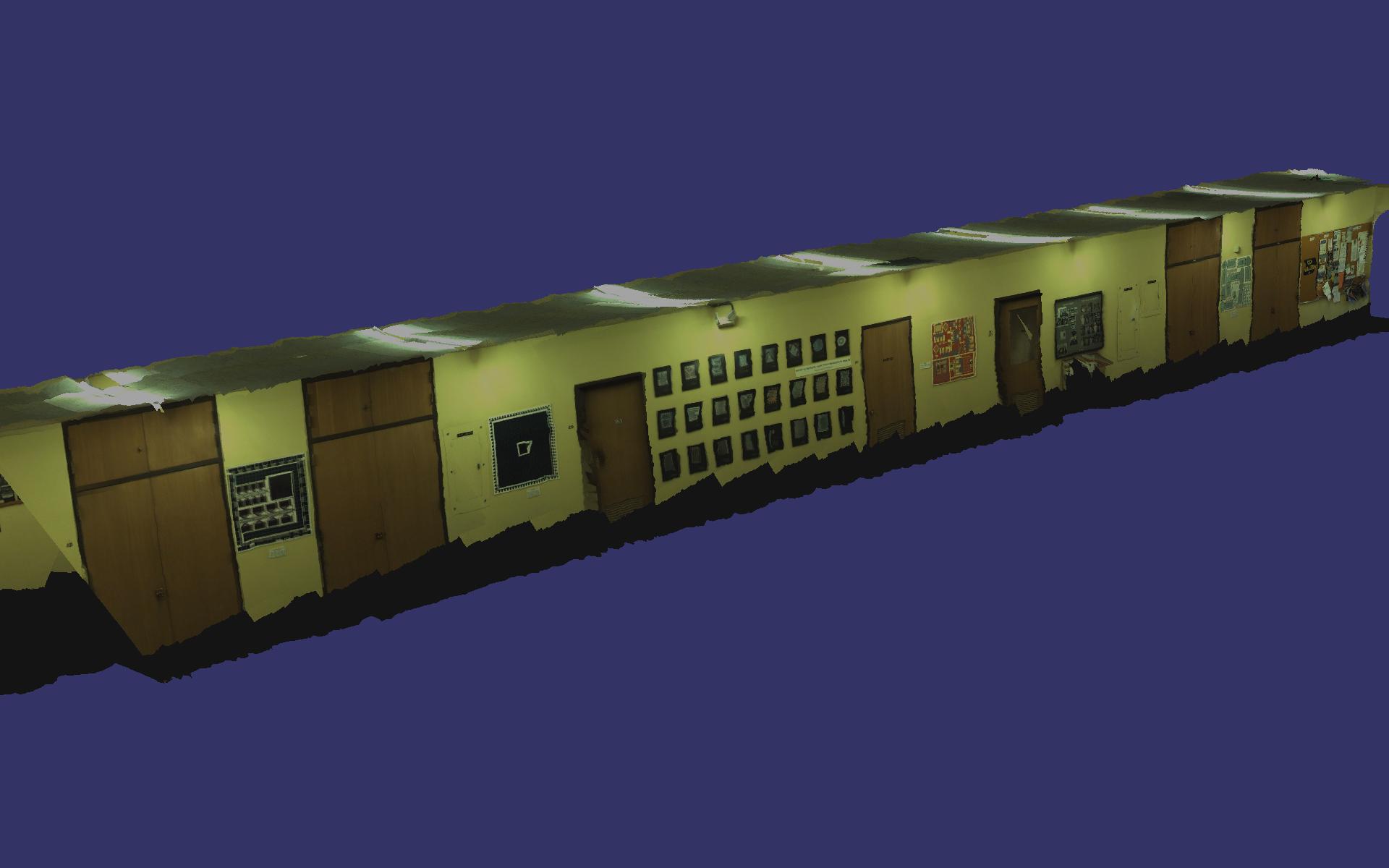
Screenshots
of 3D Models
Here
are screenshots of the blended 3D model for dataset 1.




References
G. Chen, J. Kua, S. Shum, N. Naikal, M. Carlberg,
and A. Zakhor. "Indoor
Localization Algorithms for a Human-Operated Backpack System,"
submitted to 3D Data Processing, Visualization, and Transmission 2010, Paris,
France, May 2010. [Adobe PDF]
N. Naikal, J. Kua, G. Chen, and A. Zakhor. "Image Augmented Laser Scan Matching for Indoor Dead Reckoning," IEEE/RSJ International Conference on Intelligent RObots and Systems (IROS), St. Louis, MO, October 2009. [Adobe PDF]